Design of routing API
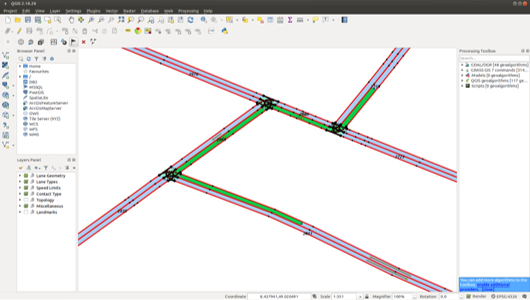
Another core feature to be used on top of map data is routing. For this the ad_map_access library provides an implementation of an A* algorithm on top of the topological road network data. Having this in place one is able to plan a route between two points in the map:
 |
|---|
| A planned route (green) through the road network |
Route planning
Thereby, the route planning functions provide different overloads (route::planRoute() ) and/or routing options to be able to e.g.:
- Consider or ignore the lane orientation at routing start position
- Consider or ignore the lane orientation at routing destination position
- Consider or ignore the nominal driving direction of the lanes
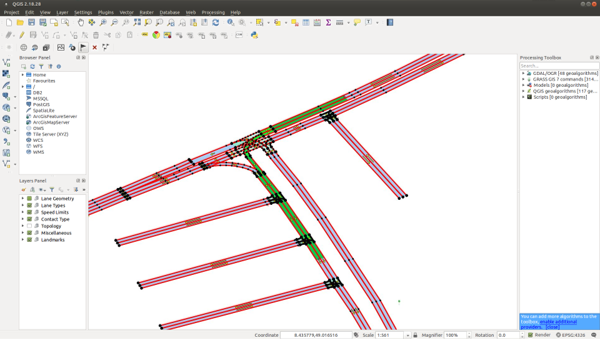
The route planning algorithm is returning an object of type route::FullRoute. A full route always contains all drivable lanes parallel having the same nominal driving direction within a certain road segment. Therefore, the planning result in a multi-lane road layout looks as sketched in the following QGIS screenshot:
 |
|---|
| A planned route (green) through the road network with multiple lanes for one driving direction |
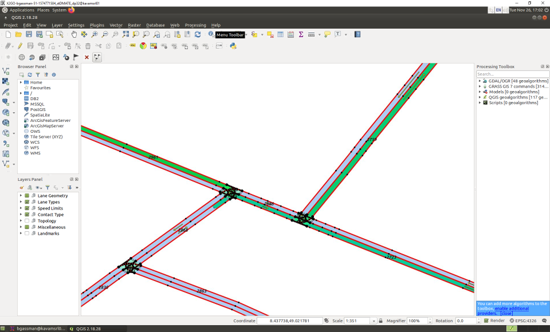
Route prediction
Besides route planning also prediction functionality is implemented. The functions of the route::predictRoute* family provide a list of possible routes (FullRoute) within a certain:
- Distance
- Duration
 |
|---|
| Route prediction results in three predicted routes (different green tones) |
Connected route
By applying the standard route planning functionality while ignoring the nominal driving direction leads to a special kind of route calculation. Considering two vehicles on the road one is able to query the route connecting these two vehicles with each other by calling the route::calculateConnectingRoute() function.
Operations on Routes
Besides the pure planning functionality of routes, there are especially a broad spectrum on operations defined based on routes. This includes e.g. the following areas:
- Iterate on route, Query sections of the route, Query speed limits on route
- Calculate length and (expected) duration
- Get borders (left and right edge) of the route (or parts of it) which can be used to calculate the driving corridor for a vehicle within ENU coordinate frame.
- Shorten route and route segments
- Extend route by time or distance
- Add opposing lanes to route (used to extend a route to bypass static obstacles on the lane)
- Find (required) lane change
- Find (neareast) waypoint on route based on diverse query input
- lane::LaneId
- point::ParaPoint (laneId, parametricOffset)
- point::ParaPointList (list of point::ParaPoint)
- MapMatchedPositionConfidenceList
- Object on route: MapMatchedBoudingBox
- Intersection on route