C++ Library for Accessing Automated Driving Maps
Table of contents
Introduction
This ad_map_access library provides a C++ implementation for accessing and operating on AD map data. ad_map_access transfers a-priori AD map information from a standardized OpenDRIVE file format into an internal representation. Optionally, the internal representation can be stored/read in a proprietary binary format. Furthermore, the MapMaker tools provide basic offline conversion from OpenStreetMap data into the internal ad_map_access binary format.
| Input | Map Database in exchange format | Mode |
|---|---|---|
| adm | AdMapAccess proprietary binary storage format | read/write |
| xodr | OpenDRIVE xml format | read |
| osm | OpenStreetMap offline conversion | osm → adm |
On top of the internal representation ad_map_access provides an API to access the map data (like road, lanes or landmarks and their semantics), perform coordinate transformations and other operations on geometry data. Furthermore, some higher level operations are available to perform map matching, route planning and other analysis operations required for automated driving, like e.g. right-of-way within intersections.
| Output | Map Database API |
|---|---|
| Map Data | search and retrieval of e.g. road layout, restrictions, landmarks, traffic signs/lights, ... |
| Coordinate Transformation | Geo ⇆ ECEF ⇆ ENU |
| Geometry | operations on points, heading, edges, lane borders |
| Map Matching | with points or objects with bounding box |
| Routes | planning, prediction and manipulation |
| Intersection | right of way handling |
High Level Design
The high level design documentation provides more insights on the architecture and functionality of this library.
API documentation
Detailed documentation on API level is available via Doxygen documentation within the code.
Python Binding
There is also a python binding for the ad_map_access library available: ad_map_access_python
Tools
QGIS
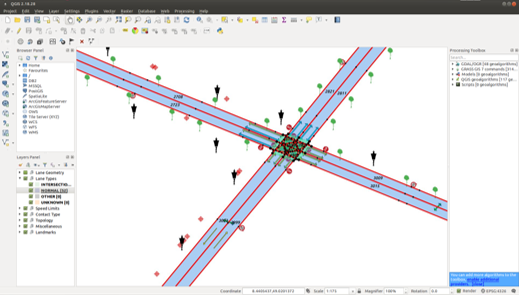
Visualization of the map data is crucial to be able to inspect the data and work with it. Therefore a plugin for the free QGIS tool (currently Version 3.1x) is available providing insight into the inner data model of the map. The following shows a screenshot with active ad_map_access_qgis plugin:
 |
|---|
| Screenshot of the QGIS tool with enabled ad map plugin |
The following map data is e.g. visualized there:
- road layout with individual lane segments
- the supporting points of the borders (red)
- the nominal driving direction within the lane (yellow arrows inside)
- the type of lane: normal (light blue), intersection (light green)
- lane contact relations like left/right neighbor, successor/predecessor lane
- right-of-way regulation, speed limits and other landmarks
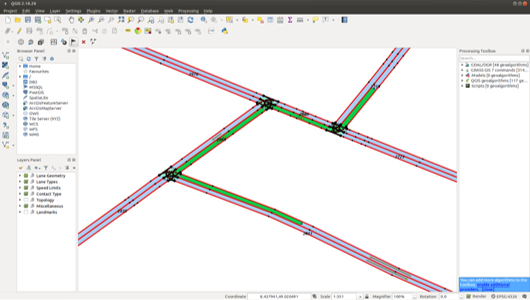
Also basic tools to test the map matching and routing functionality are provided:
 |
|---|
| The ad map QGIS plugin visualizes some basic routing results |
MapMaker
The tools around map making are there to provide basic offline conversion from OpenStreetMap data into the proprietary ad_map_access binary format. In general these tools are making use of an intermediate format to be easy extended for other input or output formats. For details see the MapMaker documentation.