DataType ENUObjectPosition. More...
#include <ad/map/match/ENUObjectPosition.hpp>
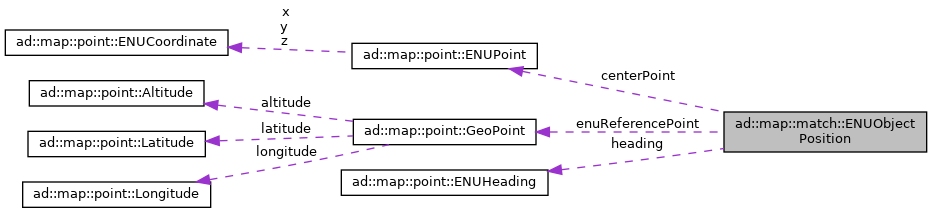
Collaboration diagram for ad::map::match::ENUObjectPosition:
Public Types | |
| typedef std::shared_ptr< ENUObjectPosition > | Ptr |
| Smart pointer on ENUObjectPosition. | |
| typedef std::shared_ptr< ENUObjectPosition const > | ConstPtr |
| Smart pointer on constant ENUObjectPosition. | |
Public Member Functions | |
| ENUObjectPosition ()=default | |
| standard constructor | |
| ~ENUObjectPosition ()=default | |
| standard destructor | |
| ENUObjectPosition (const ENUObjectPosition &other)=default | |
| standard copy constructor | |
| ENUObjectPosition (ENUObjectPosition &&other)=default | |
| standard move constructor | |
| ENUObjectPosition & | operator= (const ENUObjectPosition &other)=default |
| standard assignment operator More... | |
| ENUObjectPosition & | operator= (ENUObjectPosition &&other)=default |
| standard move operator More... | |
| bool | operator== (const ENUObjectPosition &other) const |
| standard comparison operator More... | |
| bool | operator!= (const ENUObjectPosition &other) const |
| standard comparison operator More... | |
Public Attributes | |
| ::ad::map::point::ENUPoint | centerPoint |
| ::ad::map::point::ENUHeading | heading {std::numeric_limits<double>::quiet_NaN()} |
| ::ad::map::point::GeoPoint | enuReferencePoint |
| ::ad::physics::Dimension3D | dimension |
Detailed Description
DataType ENUObjectPosition.
Member Function Documentation
◆ operator!=()
|
inline |
standard comparison operator
- Parameters
-
[in] other Other ENUObjectPosition.
- Returns
trueif both ENUObjectPosition are different
◆ operator=() [1/2]
|
default |
standard assignment operator
- Parameters
-
[in] other Other ENUObjectPosition
- Returns
- Reference to this ENUObjectPosition.
◆ operator=() [2/2]
|
default |
standard move operator
- Parameters
-
[in] other Other ENUObjectPosition
- Returns
- Reference to this ENUObjectPosition.
◆ operator==()
|
inline |
standard comparison operator
- Parameters
-
[in] other Other ENUObjectPosition
- Returns
trueif both ENUObjectPosition are equal
Member Data Documentation
◆ centerPoint
| ::ad::map::point::ENUPoint ad::map::match::ENUObjectPosition::centerPoint |
3D position in ENU coordinates
◆ dimension
| ::ad::physics::Dimension3D ad::map::match::ENUObjectPosition::dimension |
3D dimension of the object
◆ enuReferencePoint
| ::ad::map::point::GeoPoint ad::map::match::ENUObjectPosition::enuReferencePoint |
GNSS coordinate of the coordinate system origin / reference frame
◆ heading
| ::ad::map::point::ENUHeading ad::map::match::ENUObjectPosition::heading {std::numeric_limits<double>::quiet_NaN()} |
Angle in ENU coordinate system as angle measured from East to North axis (yaw) in radians.
The documentation for this struct was generated from the following file:
- generated/include/ad/map/match/ENUObjectPosition.hpp
